
|
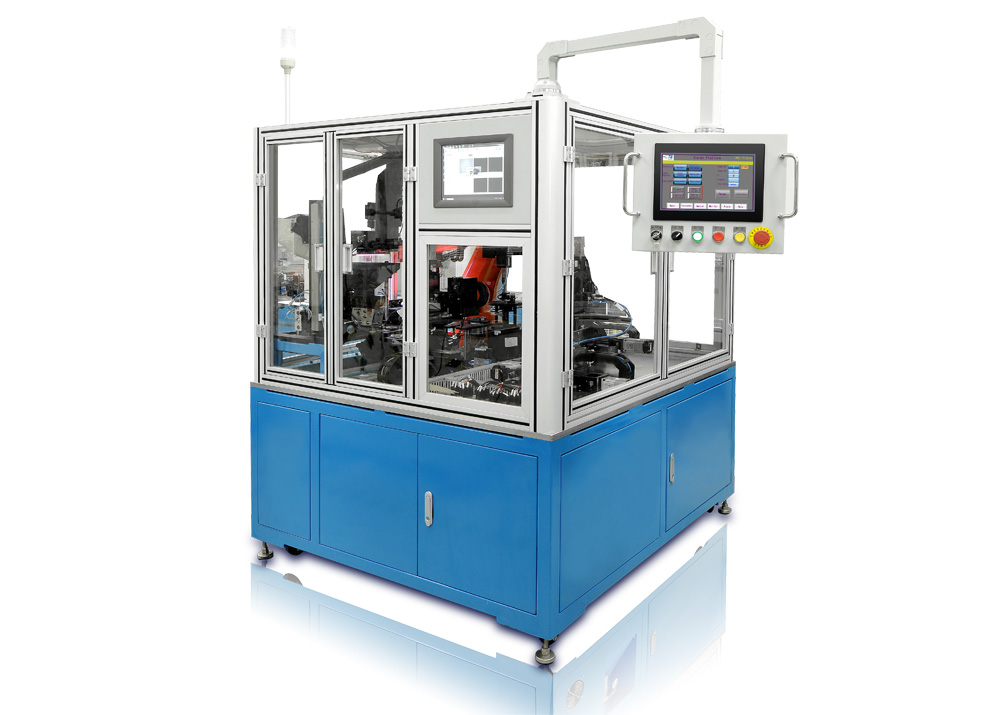
操作系统 |
Windows XP & 欧姆龙触摸屏 |
|
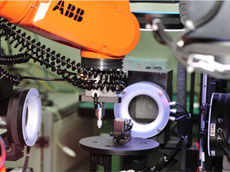
机器人系统 |
机器人型号: ABB IRB 120 ROBOT 机器人定位精度: ±0.01mm 轴1: 工作范围:+165° ~ −165° 最大速度:250° /s 轴2: 工作范围:+110° ~ −110° 最大速度:250° /s 轴3: 工作范围:+70° ~ −90° 最大速度:250° /s 轴4: 工作范围:+160° ~ −160° 最大速度:320° /s 轴5: 工作范围:+120° ~ −120° 最大速度:320° /s 轴6: 工作范围:+400° ~ −400° 最大速度:420° /s 最大臂长: 580 mm 最大负载: 3Kg (垂直臂:4Kg) |
|
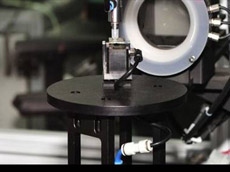
机器视觉系统 |
抓取放置物料相机1#~2#: 2百万像素, 环形光源 物料参数检测相机3#~6# :5百万像素, 环形光源和同轴光源 |
|
精度 |
±0.01mm |
|
电源 |
AC220V±10V,50HZ |
|
气压(压力) |
4~6Kgf/cm |
|
机器尺寸(长*宽*高) |
1400mm×1500mm×1800mm |
|
重量 |
2000 Kg |
|
产能 |
800个/小时 |
|
切换时间 |
30s |
|
良率 |
>99.95% |
|
设备 OEE |
85% |
|
操作工人 |
0.50 人每台机 |
 |
 |
 |
|
柔性视觉检测模块 |
柔性供料模块 |
快速切换工具包 |
 |
 |
 |
|
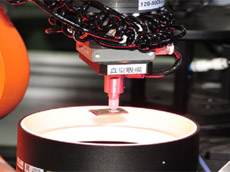
旋转平台 |
视觉识别并定位物料
|
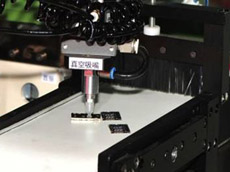
视觉引导抓取物料 |